ਉਦਯੋਗਿਕ ਨਿਰਮਾਣ ਆਰਥਿਕ ਅਤੇ ਸਮਾਜਿਕ ਵਿਕਾਸ ਨੂੰ ਉਤਸ਼ਾਹਿਤ ਕਰਨ ਲਈ ਇੱਕ ਮਹੱਤਵਪੂਰਨ ਕੜੀ ਹੈ। ਵਰਤਮਾਨ ਵਿੱਚ, ਆਟੋਮੈਟਿਕ ਵੈਲਡਿੰਗ ਉਪਕਰਣਾਂ 'ਤੇ ਖੋਜ ਡੂੰਘਾਈ ਅਤੇ ਕੰਕਰੀਟ ਹੋ ਰਹੀ ਹੈ, ਜਿਸ ਕਾਰਨ ਇਹ ਵੱਖ-ਵੱਖ ਕਿਸਮਾਂ ਦੇ ਵੈਲਡਿੰਗ ਢਾਂਚੇ ਦੇ ਉਤਪਾਦਨ ਵਿੱਚ ਵਿਆਪਕ ਤੌਰ 'ਤੇ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ।
ਆਟੋਮੈਟਿਕ ਵੈਲਡਿੰਗ ਦੀ ਪ੍ਰਕਿਰਿਆ ਵਿੱਚ, ਵੈਲਡਿੰਗ ਅਸੈਂਬਲੀ ਗੈਪ ਗਲਤੀ ਦਾ ਇੱਕ ਹੱਦ ਤੱਕ ਬੁੱਧੀਮਾਨ ਅਤੇ ਡਿਜੀਟਲ ਵਾਜਬ ਨਿਯੰਤਰਣ, ਇਸ ਆਧਾਰ 'ਤੇ, ਵਰਕਪੀਸ ਸਥਿਤੀ ਅੰਤਰ, ਵਰਕਪੀਸ ਜੋੜ ਭਟਕਣਾ ਅਤੇ ਹੋਰ ਕਾਰਕਾਂ 'ਤੇ ਵੀ ਵਿਚਾਰ ਕਰਨਾ ਚਾਹੀਦਾ ਹੈ। ਇਸ ਲਈ, ਲੇਜ਼ਰ ਵੈਲਡਿੰਗ ਸੀਮ ਟਰੈਕਿੰਗ ਤਕਨਾਲੋਜੀ ਵੈਲਡਿੰਗ ਪ੍ਰਕਿਰਿਆ ਵਿੱਚ ਇੱਕ ਮਹੱਤਵਪੂਰਨ ਭੂਮਿਕਾ ਨਿਭਾਉਂਦੀ ਹੈ।
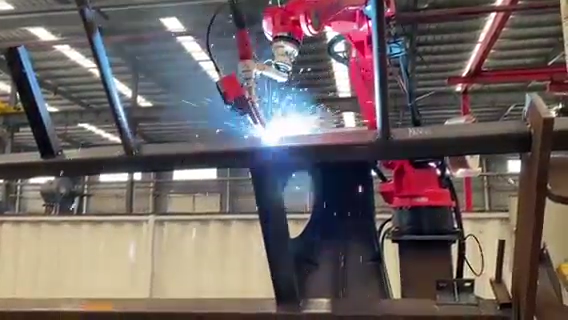
ਸੀਮਿੰਟ ਟੈਂਕ ਕਾਰ ਕਾਰ ਬੇਸ ਵੈਲਡਿੰਗ ਸੱਤ ਧੁਰੀ ਧਰਤੀ ਦੀ ਔਰਬਿਟ ਅੱਠ ਧੁਰੀ ਰੋਟੇਸ਼ਨ ਲੇਜ਼ਰ ਵੈਲਡਿੰਗ ਨਾਲ
-ਵਰਕਪੀਸ ਦੀ ਸਥਿਤੀ ਬਹੁਤ ਵੱਖਰੀ ਹੁੰਦੀ ਹੈ
-ਵਰਕਪੀਸ ਕਨੈਕਸ਼ਨ 'ਤੇ ਭਟਕਣਾ ਮੌਜੂਦ ਹੈ
-ਉੱਚ ਵੈਲਡਿੰਗ ਸ਼ੁੱਧਤਾ ਦੀ ਲੋੜ ਹੈ
-ਮਾੜਾ ਵੈਲਡਿੰਗ ਵਾਤਾਵਰਣ ਅਤੇ ਧੂੰਆਂ
ਇਸ ਮਾਮਲੇ ਵਿੱਚ, Yooheart ਇੰਟੈਲੀਜੈਂਟ ਰੋਬੋਟ HY1006A-145 ਨੂੰ ਲੇਜ਼ਰ ਵੈਲਡਿੰਗ ਸੀਮ ਟਰੈਕਿੰਗ ਸਿਸਟਮ ਨਾਲ ਵੈਲਡਿੰਗ ਲਈ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ, ਜਿਸ ਵਿੱਚ ਉੱਚ ਲਚਕਤਾ, ਸਥਿਰਤਾ ਅਤੇ ਭਰੋਸੇਯੋਗਤਾ ਹੈ।
ਹਰੇਕ ਵੈਲਡਿੰਗ ਤੋਂ ਪਹਿਲਾਂ, ਉਪਕਰਣ ਪਹਿਲਾਂ ਵੈਲਡਿੰਗ ਸੀਮ ਲੋਕੇਟਿੰਗ ਰਾਹੀਂ ਵੈਲਡਿੰਗ ਸੀਮ ਦੇ ਕੋਆਰਡੀਨੇਟ ਨੂੰ ਸਕੈਨ ਅਤੇ ਰਿਕਾਰਡ ਕਰਦਾ ਹੈ, ਅਤੇ ਫਿਰ ਅੰਦਰੂਨੀ ਐਲਗੋਰਿਦਮ ਦੁਆਰਾ ਕੋਆਰਡੀਨੇਟ ਆਫਸੈੱਟ ਦੀ ਗਣਨਾ ਕਰਦਾ ਹੈ ਅਤੇ ਸਮੇਂ ਵਿੱਚ ਅਸਲ ਭਟਕਣਾ ਨੂੰ ਠੀਕ ਕਰਨ ਲਈ ਸੰਦਰਭ ਕੋਆਰਡੀਨੇਟ ਪੈਰਾਮੀਟਰਾਂ ਨੂੰ ਅਸਲ ਸਮੇਂ ਵਿੱਚ ਰੱਖਦਾ ਹੈ, ਤਾਂ ਜੋ ਵੈਲਡਿੰਗ ਤੋਂ ਬਾਅਦ ਉਤਪਾਦ ਦੀ ਸੀਲਿੰਗ ਅਤੇ ਇਕਸਾਰਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਇਆ ਜਾ ਸਕੇ।
"ਚਾਰ ਬਿੰਦੂ ਇੰਟਰਸੈਕਸ਼ਨ" ਵਿਧੀ
ਜਿਵੇਂ ਕਿ ਸਾਰਿਆਂ ਨੂੰ ਪਤਾ ਹੈ, ਦੋ ਬਿੰਦੂ ਇੱਕ ਸਿੱਧੀ ਰੇਖਾ ਨਿਰਧਾਰਤ ਕਰਦੇ ਹਨ, ਪਰ ਵਰਕਪੀਸ ਅਸੈਂਬਲੀ ਕੋਣ ਬਣਾਏਗੀ, ਰਵਾਇਤੀ ਐਲਗੋਰਿਦਮ ਆਪਣੀ ਸਥਿਤੀ ਨਿਰਧਾਰਤ ਕਰਨ ਵਿੱਚ ਅਸਮਰੱਥ ਹੈ, ਇਸ ਲਈ ਚਾਰ ਵਜੇ "ਇੰਟਰਸੈਕਸ਼ਨ" ਵਿਧੀ ਦੀ ਵਰਤੋਂ ਕਰਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ, ਦੋ ਲਾਈਨਾਂ ਨੂੰ ਕੱਟਦੀਆਂ ਹੋਈਆਂ ਇੰਟਰਸੈਕਸ਼ਨ ਬਿੰਦੂ ਪੈਦਾ ਕਰਦੀਆਂ ਹਨ, ਜਾਣੇ-ਪਛਾਣੇ ਚਾਰ ਬਿੰਦੂਆਂ ਦੇ ਕੋਆਰਡੀਨੇਟਸ ਦੇ ਨਿਰਧਾਰਨ ਦੁਆਰਾ ਵਿਸ਼ੇਸ਼ ਐਲਗੋਰਿਦਮ ਇੰਟਰਸੈਕਸ਼ਨ ਬਿੰਦੂ ਕੋਆਰਡੀਨੇਟ ਦੀ ਸਥਿਤੀ ਦੀ ਗਣਨਾ ਕਰਦਾ ਹੈ, ਤਾਂ ਜੋ ਵੈਲਡਿੰਗ ਦੇ ਉਦੇਸ਼ ਨੂੰ ਪ੍ਰਾਪਤ ਕੀਤਾ ਜਾ ਸਕੇ।

ਲੇਜ਼ਰ ਸੀਮ ਟਰੈਕਿੰਗ ਸਿਸਟਮ
ਲੇਜ਼ਰ ਵੈਲਡਿੰਗ ਸੀਮ ਟਰੈਕਿੰਗ ਸਿਸਟਮ ਮੁੱਖ ਤੌਰ 'ਤੇ ਲੇਜ਼ਰ ਸੈਂਸਰਾਂ ਅਤੇ ਨਿਗਰਾਨੀ ਟਰਮੀਨਲਾਂ ਤੋਂ ਬਣਿਆ ਹੁੰਦਾ ਹੈ। ਲੇਜ਼ਰ ਸੈਂਸਰ ਦੀ ਵਰਤੋਂ ਵੈਲਡਿੰਗ ਸੀਮ ਜਾਣਕਾਰੀ ਦੀ ਸਰਗਰਮ ਪ੍ਰਾਪਤੀ ਅਤੇ ਅਸਲ-ਸਮੇਂ ਦੀ ਪ੍ਰਕਿਰਿਆ ਲਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਅਤੇ ਉਦਯੋਗਿਕ ਰੋਬੋਟਾਂ ਨਾਲ ਅਸਲ-ਸਮੇਂ ਦੇ ਸੰਚਾਰ ਨੂੰ ਬਣਾਈ ਰੱਖਦੀ ਹੈ। ਨਿਗਰਾਨੀ ਟਰਮੀਨਲ ਸੈਂਸਰਾਂ ਦੀ ਨਿਗਰਾਨੀ ਅਤੇ ਸੰਰਚਨਾ ਕਰਦਾ ਹੈ। ਸਿਸਟਮ ਵਿੱਚ ਬੁੱਧੀਮਾਨ ਵੈਲਡਿੰਗ ਦੀਆਂ ਜ਼ਰੂਰਤਾਂ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ ਵੈਲਡਿੰਗ ਤੋਂ ਪਹਿਲਾਂ ਸਥਾਨ, ਟਰੈਕਿੰਗ ਅਤੇ ਸਕੈਨਿੰਗ ਦੇ ਕਾਰਜ ਵੀ ਹਨ।
ਕੰਮ ਕਰਨ ਦਾ ਸਿਧਾਂਤ: ਵੈਲਡ ਸੀਮ ਸਕੈਨਿੰਗ, ਪੁਆਇੰਟ ਕਲਾਉਡ ਇਮੇਜ ਫਿਟਿੰਗ, ਐਲਗੋਰਿਦਮ ਵਿਸ਼ੇਸ਼ਤਾ ਬਿੰਦੂਆਂ ਦੀ ਸਹੀ ਪਛਾਣ ਕਰਦਾ ਹੈ, ਅਤੇ ਰੋਬੋਟ ਨੂੰ ਭੇਜੇ ਗਏ ਗਣਨਾ ਨਤੀਜਿਆਂ ਦੇ ਅਸਲ-ਸਮੇਂ ਦੇ ਡੇਟਾ ਨੂੰ ਨਿਯੰਤਰਣ ਨਿਰਦੇਸ਼ਾਂ ਵਿੱਚ, ਰੋਬੋਟ ਦੇ ਸੰਚਾਲਨ ਨੂੰ ਸੋਧਦਾ ਜਾਂ ਮਾਰਗਦਰਸ਼ਨ ਕਰਦਾ ਹੈ।
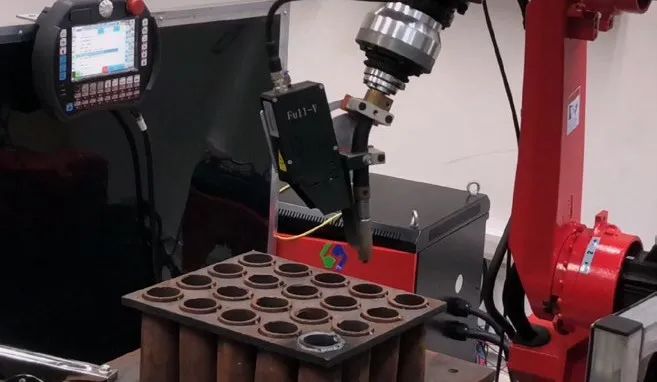
ਨਾਲੀਦਾਰ ਪਲੇਟ ਘੋਲ

ਗੋਲ ਮੋਰੀ ਆਟੋਮੈਟਿਕ ਪਲੱਗ ਵੈਲਡਿੰਗ ਹੱਲ

ਗੋਲ ਸੀਮ ਘੋਲ

ਟਿਊਬਪਲੇਟ ਹੱਲ
ਯੂਨਹੂਆ ਇੰਟੈਲੀਜੈਂਟ ਤੇਜ਼ ਤੈਨਾਤੀ, ਸੁਰੱਖਿਅਤ ਅਤੇ ਕੁਸ਼ਲ ਆਟੋਮੇਸ਼ਨ ਹੱਲ ਅਤੇ ਰੀਅਲ-ਟਾਈਮ ਸਿਸਟਮ ਹੱਲ ਪ੍ਰਦਾਨ ਕਰ ਸਕਦਾ ਹੈ। ਲੇਜ਼ਰ ਵਿਜ਼ਨ ਵੈਲਡਿੰਗ ਸੀਮ ਟਰੈਕਿੰਗ ਸਿਸਟਮ ਵੈਲਡਿੰਗ ਰੋਬੋਟ ਨੂੰ ਰੀਅਲ-ਟਾਈਮ ਵੈਲਡਿੰਗ ਸੀਮ ਲੋਕੇਟਿੰਗ ਅਤੇ ਟਰੈਕਿੰਗ ਨੂੰ ਮਹਿਸੂਸ ਕਰਨ ਦੇ ਯੋਗ ਬਣਾਉਂਦਾ ਹੈ, ਅਤੇ ਵੈਲਡਿੰਗ ਪ੍ਰਕਿਰਿਆ ਵਿੱਚ ਵੈਲਡਿੰਗ ਸੀਮ ਆਫਸੈੱਟ ਦੇ ਅਨੁਸਾਰ ਵੈਲਡਿੰਗ ਟ੍ਰੈਜੈਕਟਰੀ ਨੂੰ ਠੀਕ ਕਰਦਾ ਹੈ, ਤਾਂ ਜੋ ਅਸਲ ਬੁੱਧੀਮਾਨ ਵੈਲਡਿੰਗ ਨੂੰ ਮਹਿਸੂਸ ਕੀਤਾ ਜਾ ਸਕੇ।
ਪੋਸਟ ਸਮਾਂ: ਅਪ੍ਰੈਲ-09-2022



